ROBOTIC MANIPULATION RESEARCH
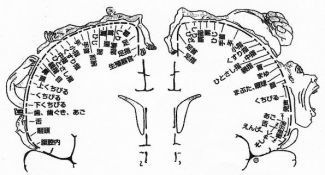
The figure on the left, called a cortical homunculus map (from "The Overevolved Brain" by Yuji Ikeya), shows where the functions of various parts of the human body correspond to in the brain. The brain has a "motor cortex" and a "sensory cortex", but the fingers and palms of the hand occupy 1/3 of the motor cortex and 1/4 of the sensory cortex. For this reason, the hands and fingers are also called the "second brain". Therefore, studying the functions of the hands and fingers is directly related to elucidating human intelligence. Therefore, research on robotic manipulation is a very important element in realizing intelligent robots.
Humans can grasp and manipulate everyday objects with their hands without difficulty in many cases. Because they can grasp and manipulate objects so unconsciously, humans are often unaware of the difficulty and even find it hard to explain the difficulties of the task. However, the problem of replicating these functions is very profound and difficult. For example, consider the problem of giving a recipe for a meal to a robot and having the robot cook it. What is written in the recipe is only a very small part of the instruction of the task, and the human will realize that it is impossible for a robot to cook the meal without teaching the robot a vast amount of information. Thus, humans have accumulated information on various object manipulations during the process of evolution and growth, and when they actually perform some task, they make full use of this a priori knowledge to perform the task. In short, when manipulating objects with robots, the key point is how to implement the "common sense" that humans use unconsciously.
For an introduction to manipulation research and recent research trends, please refer to the following articles (in Japanese):