INDUSTRIAL APPLICATION
マニピュレーションの研究を応用する分野として最も期待されているのが、産業用ロボットです。実は、製品の製造工程のうち、部品供給、製品組立、ならびに製品検査の工程の自動化は非常に難しいと考えられています。実際、これらの工程が労働集約的であるために、人件費の高騰を招いた結果、国内の製造業の空洞化の一因となっています。特に、部品供給と製品組立の工程を自動化するためには、マニピュレーション研究を駆使する必要があります。

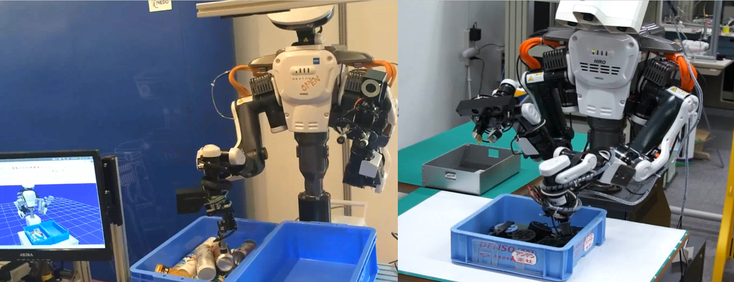
部品供給作業
まず、部品供給の工程に着目します。製品の組み立てを自動化しようと考えた場合、組み立て工程への部品供給をどのようにして自動化するかが問題となります。特に、製品を構成する部品点数が多くなると、自動化は困難になります。製品を構成する部品は様々な形状をしていたり、またゴムなど柔らかい部品も含まれていたりします。このような種々の部品を視覚センサで的確に認識し、かつハンドで的確に把持しなければなりませんので、これはまさしくロボットハンドによる把持の研究と結びついていると考えられます。
また、近年Eコマースが盛んに利用されています。Eコマースの物流センターでは、製品の注文が入ると、注文が入った商品を探し、その商品を人が取って箱詰めした上で消費者の元に発送しています。この商品を人が取って箱詰めする作業に関しても、上で述べた部品供給工程の自動化とほぼ同じ問題が存在し、この工程を自動化することは非常に大切な問題と考えられています。
組み立て作業
つぎに、実際に製品の組み立てをロボットで行うことを考えます。近年、きめ細かく消費者の要求に対応するために、製品の製造形態として変種変量生産が盛んに導入されています。このとき、ロボットは従来のような定型作業のみをこなしていればいいというわけにはいかなくなります。具体的には、次のような問題点を解決しなくてはなりません。
- 教示コスト:人が双腕ロボットに動作を教示する作業は大変であり、変種変量生産で製造プロセスが頻繁に変化する場合にどのようにして動作の教示を容易にするかを考える必要があります。
- 部品の把持:組み立て作業を行う場合、ハンドは部品を確実に把持する必要があります。このとき、通常は特定の部品を確実に把持できる専用のハンドをが良く用いられます。この場合、把持する部品が変わる度に、ツールチェンジャと呼ばれる装置を用いてハンドを交換しながら作業を行う必要が生じますが、部品点数が多くなるに従って用意しなければならないハンドの数が増大する問題を抱えています。また、与えられた部品に対してどのようなハンドを用いるかも決めなくてはなりません。
- 難工程の存在:柔軟なケーブルを挿入する作業など、ヒトが経験と知識に基づいて行っている作業をロボットで代行する場合、ヒトが作業を行うためのコツを抽出してロボットに置き換える必要があります。
Research Topics
Robotic Picking research
Publications
- Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda: Initial Experiments on Learning-Based Randomized Bin-Picking Allowing Finger Contact with Neighboring Objects, Proc. of IEEE Int. Conf. on Automation Science and Engineering, pp. 1196-1202, Fort Worth, USA, August, 2016.
- Kensuke Harada, Weiwei Wan, Tokuo Tsuji, Kohei Kikuchi, Kazuyuki Nagata, and Hiromu Onda: Iterative Visual Recognition for Learning Based Randomized Bin-Picking, Preprints of 2016 Int. Symposium on Experimental Robotics, Tokyo, Japan, October, 2016.
- Kensuke Harada, Weiwei Wan, Kohei Kikuchi, Kazuyuki Nagata and Hiromu Onda, “Experiments on Learning Based Industrial Bin-picking with Iterative Visual Recognition,” Industrial Robot: an International Journal, vol. 45, no. 4, pp. 446-457, DOI 10.1108/IR-01-2018-0013, 2018.
- Ryo Matsumura, Kensuke Harada, Yukiyasu Domae, and Weiwei Wan, “Learning Based Industrial Bin-picking Trained with Approximate Physics Simulator,” Proceedings of International Conference on Intelligent Autonomous Systems, #33, 2018.
- Ryo Matsumura, Yukiyasu Domae, Weiwei Wan, and Kensuke Harada, “Learning Based Robotic Bin-picking for Potentially Tangled Objects,” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 7984-7991, 2019.
- Yuya Sato, Kensuke Harada, Nobuchika Sakata, Weiwei Wan, and Ixchel G. Ramirez-Alpizar, “Two-stage Picking Method for Piled Shiny Objects,” Proceedings of the 15th IFToMM World Congress on Mechanism and Machine Science, (T.Uhl(ed.), Advances in Mechanism and Machine Science, Mechanism and Machine Science 73, Springer), pp. 2049-2058, 2019.
- Kenta Matsuura, Keisuke Koyama, Weiwei Wan, and Kensuke Harada, “Robotic Picking for Piled Sushi Topping,” Proceedings of the 2021 International Conference on Artificial Life and Robotics, pp. 328-331, 2021.
- Xinyi Zhang, Keisuke Koyama, Yukiyasu Domae, Weiwei Wan, Kensuke Harada, "A Topological Solution of Entanglement for Complex-shaped Parts in Robotic Bin-picking," Proceedings of IEEE International Conference on Automation, Science and Engineering, pp. 461-467, 2021.