TASK/MOTION PLANNING

ロボットが作業を行う動作を自動的に計画する問題を考えます。このとき、以下のような情報を作業の性質やロボットの機構的な特徴を考慮することで決めなくてはなりません。
ここで、左図には組立シーケンスを決定するために用いるグラフ構造を示しています。このように、作業・動作計画問題ではロボットが作業するための動作をグラフ探索問題に帰着させ、上記を考慮にいれつつ自動的に決定します。
Research Topics
Research on Planning Robotic Cooking Task
Publications
- Hoshito Nagahama, Ixchel Georgina Ramirez-Alpizar, Kensuke Harada, “Food Arrangement Framework for Cooking Robots,” Proceedings of IEEE/ASME International Conference on Advanced Intelligent Mechatronics, pp. 1179-1184, 2022.(Proceeding)
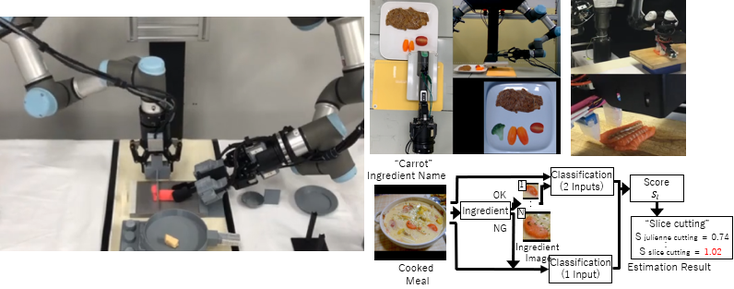
- Kota Takata, Takuya Kiyokawa, Ixchel G. Ramirez-Alpizar, Natsuki Yamanobe, Weiwei Wan, and Kensuke Harada, “Efficient Task/Motion Planning for a Dual-arm Robot from Language Instructions and Cooking Images,” Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. 2022 (Preprint)
- Kota Takata, Takuya Kiyokawa, Ntsuki Yamanobe, Ixchel G.
Ramirez-Alpizar, Weiwei Wan, Kensuke Harada, “Graph Based Framework on Bimanual Manipulation Planning from Cooking Recipe, ” Robotics, vol. 11, no. 6, 2022. (Download link)
Robotic Motion Planning from Cooking Recipe
slide
Youtube
Supplementary video on "Efficient Task/Motion Planning for a Dual-arm Robot from Language Instructions and Cooking Images" presented at IROS 2022.
Youtube
Supplementary video on "Efficient Task/Motion Planning for a Dual-arm Robot from Language Instructions and Cooking Images" presented at IROS 2022.
Youtube
Supplementary video on "Graph Based Framework on Bimanual Manipulation Planning from Cooking Recipe" submitted for MDPI Robotics.
Planning Food Arrangement
Youtube
Supplementary video on "Food Arrangement Framework for Cooking Robots" presented at IEEE/ASME AIM 2022.
Research on Assembly Sequence Planning

Publications
1. Assembly Sequence Planning for Motion Planning, Weiwei Wan, Kensuke Harada, and Kazuyuki Nagata, Assembly Automatoin (AA), 2017.
2. Planning to Build Block Structures with Unstable Intermediate States Using two Manipulators, Hao Chen, Weiwei Wan, Keisuke Koyama, and Kensuke Harada, IEEE Transactions on Automation Science and Engineering (TASE), 2021. Video (Reported by IEEE Spectrum Video Friday)
Combined Assembly Task planning and motion planning
Youtube
Bimanual Object Picking from the Pile with COllapse Prediction

Youtube
Youtube
Publications
- Motoda, T.; Petit, D.; Nishi, T.; Nagata, K.; Wan, W.; Harada, K.; Shelf Replenishment Based on Object Arrangement Detection and Collapse Prediction for Bimanual Manipulation. Robotics 2022, 11, 104. https://doi.org/10.3390/robotics11050104.
- Shusei Nagato, Tomohiro Motoda, Keisuke Koyama, Weiwei Wan and Kensuke Harada, “Motion Planning to Retrieve an Object from Random File,” Proceedings of the 2022 International Conference on Artificial Life and Robotics, pp. 328-334, 2022.
- Tomohiro Motoda, Damien Petit, Weiwei Wan, and Kensuke Harada, "Bimanual Shelf Picking Planner Based on Collapse Prediction," Proceedings of IEEE International Conference on Automation, Science and Engineering, pp. 510-515, 2021.
Robotic bin picking

Learning Based Industrial Bin-picking Trained with Approximate Physics Simulator
Ryo Matsumura, Kensuke Harada, Yukiyasu Domae, and Weiwei Wan
International Conference on Intelligent Autonomous Systems (IAS) 2018




Bin-Picking for Potentially Entangled Object by Linearing Image of the Pile
Mizuki Takasu, Xinyi Zhang, Yukiyasu Domae, Weiwei Wan, Kensuke Harada
Research on craft assembly task

Publications
- Vitor Hideyo Isume, Kensuke Harada, Weiwei Wan, Yukiyasu Domae, "Using affordances for assembly: Towards a complete Craft Assembly System," Proceedings of the 21st International Conference on Control, Automation and Systems (ICCAS), 2021, pp. 2010-2014, doi: 10.23919/ICCAS52745.2021.9649936.